Robotont
Mis on Robotont
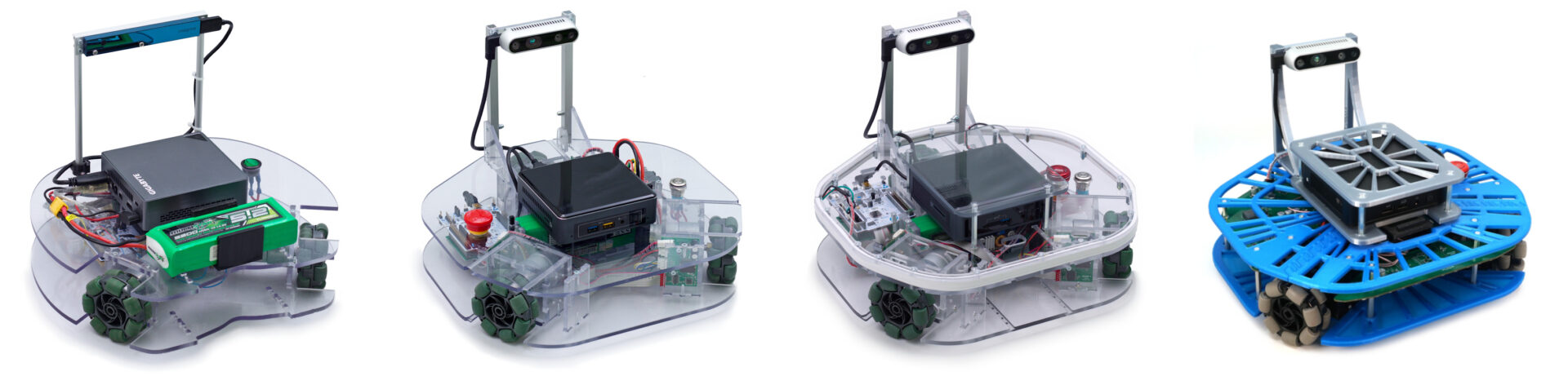
Robotont on avatud platvorm robootika-alaseks õppe- ja teadustööks. Tegu on omniliikuva mobiilse robotiga, millel on ROS (Robot Operating System) tarkvara tugi. Robotondi arendust koordineerib Tartu Ülikooli tehnoloogiainstituut.
Robotondi kasutamine
Robotonti saab kasutada igaüks, sest kõik tehnilised joonised ja tarkvara on avalikult kättesaadav Robotondi GitHubis. Robotondi riistvara saab soetada ka ClearBoti vahendusel. Ent Robotondiga on võimalik tegutseda ka vabalt kättesaadavas Gazebo simulatsiooni keskkonnas (rohkem infot meie rahvusvahelisest dokumentatsioonist).
Robotondi arendamine
Kogu robotondi arendust koordineerib Tartu Ülikool ning tegevus toimub kogukonna-põhiselt GitHubis.
Robotondi arendusest parima tervikliku ülevaate saab ingliskeelsetest artiklitest rahvusvahelistes teadusajakirjades:
- Robotont 3 ajakirjas Frontiers in Robotics and AI
- Robotont 2 ajakirjas HardwareX
Loetelu Robotondiga seotud eesti- ja ingliskeelsetest lõputöödest ja teadusartiklitest on leitav siit.