Robotont
What is Robotont?
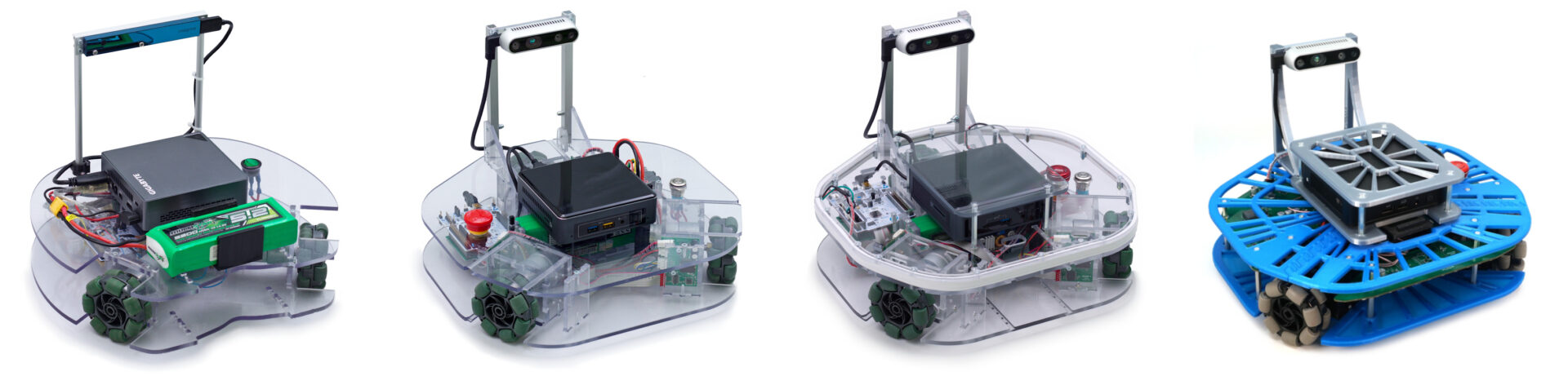
Robotont is open-source platform for robotics education and research. It is an omnidirectional mobile robot with ROS (Robot Operating System) support. Development of robotont is coordinated by the Institute of Technology, University of Tartu.
Using Robotont
Anyone can use Robotont bacause of all the technical blueprints and software are publicly available in our GitHub. Robotont hardware platform is distributed by ClearBot. However, it is possible to use the robot purely in an open-source and freely available Gazebo simulation (see further details in our documentation page).
Developing Robotont
The development of Robotont is community-based and all the source materials are available on GitHub.
The most comprehensive technical overview of Robotont development (including assembly instructions) can be found in two open-access publications:
- Robotont 3 described in Frontiers in Robotics and AI
- Robotont 2 described in HardwareX
Full list of theses and publications in English and Estonian about all generations of Robotont can be found here.